Vector calculus
Material from Vectors was moved[1] here.
Here we extend the concept of vector to that of the vector field. A familiar example of a vector field is wind velocity: It has direction and magnitude, which makes it a vector. But it also depends on position (and ultimately on time). Wind velocity is a function of (x,y,z) at any given time, equivalently we can say that wind velocity is a time-dependent field:  .
.
Derivative of a vector valued function
Let  be a vector function that can be represented as
be a vector function that can be represented as

where  is a scalar.
is a scalar.
Then the derivative of with respect to is

Note: In the above equation, the unit vectors  (i=1,2,3) are assumed constant.
(i=1,2,3) are assumed constant.
If and  are two vector functions, then from the chain rule we get
are two vector functions, then from the chain rule we get
![\begin{align}
\cfrac{d({\mathbf{a}}\cdot{\mathbf{b}})}{x} & =
{\mathbf{a}}\cdot{\cfrac{d\mathbf{b}}{dx}} + {\cfrac{d\mathbf{a}}{dx}}\cdot{\mathbf{b}} \\
\cfrac{d({\mathbf{a}}\times{\mathbf{b}})}{dx} & =
{\mathbf{a}}\times{\cfrac{d\mathbf{b}}{dx}} + {\cfrac{d\mathbf{a}}{dx}}\times{\mathbf{b}} \\
\cfrac{d[{\mathbf{a}}\cdot{({\mathbf{a}}\times{\mathbf{b}})}]}{dt} & =
{\cfrac{d\mathbf{a}}{dt}}\cdot{({\mathbf{b}}\times{\mathbf{c}})} +
{\mathbf{a}}\cdot{\left({\cfrac{d\mathbf{b}}{dt}}\times{\mathbf{c}}\right)} +
{\mathbf{a}}\cdot{\left({\mathbf{b}}\times{\cfrac{d\mathbf{c}}{dt}}\right)}
\end{align}](../I/m/084172420431123f389e18425861f31b.png)
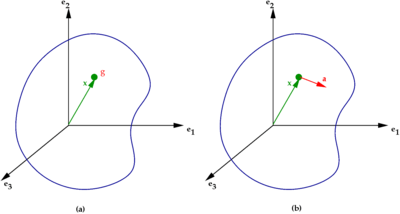
Scalar and vector fields
Let  be the position vector of any point in space. Suppose that
there is a scalar function (
be the position vector of any point in space. Suppose that
there is a scalar function ( ) that assigns a value to each point in space. Then
) that assigns a value to each point in space. Then

represents a scalar field. An example of a scalar field is the temperature. See Figure4(a).
If there is a vector function ( ) that assigns a vector to each point in space, then
) that assigns a vector to each point in space, then

represents a vector field. An example is the displacement field. See Figure 4(b).
Gradient of a scalar field
Let  be a scalar function. Assume that the partial derivatives of the function are continuous in some region of space. If the point has coordinates (
be a scalar function. Assume that the partial derivatives of the function are continuous in some region of space. If the point has coordinates ( ) with respect to the basis (
) with respect to the basis ( ), the gradient of
), the gradient of  is defined as
is defined as

In index notation,

The gradient is obviously a vector and has a direction. We can think of the gradient at a point being the vector perpendicular to the level contour at that point.
It is often useful to think of the symbol  as an operator of the form
as an operator of the form

Divergence of a vector field
If we form a scalar product of a vector field  with the operator, we get a scalar quantity called the
divergence of the vector field. Thus,
with the operator, we get a scalar quantity called the
divergence of the vector field. Thus,

In index notation,

If  , then
, then  is called a divergence-free field.
is called a divergence-free field.
The physical significance of the divergence of a vector field is the rate at which some density exits a given region of space. In the absence of the creation or destruction of matter, the density within a region of space can change only by having it flow into or out of the region.
Curl of a vector field
The curl of a vector field is a vector defined as
The physical significance of the curl of a vector field is the amount of rotation or angular momentum of the contents of a region of space.
Laplacian of a scalar or vector field
The Laplacian of a scalar field is a scalar defined as

The Laplacian of a vector field is a vector defined as

Identities in vector calculus
Some frequently used identities from vector calculus are listed below.





Fundamental theorems of vector calculus
One version of the fundamental theorem of one-dimensional calculus is

This is a theorem about a function,  , its first derivative, and a line segment. Two notations used to denote this line segment are [a,b] and the inequality, a<x<b. In the field of topology,
, its first derivative, and a line segment. Two notations used to denote this line segment are [a,b] and the inequality, a<x<b. In the field of topology,  denotes boundary. If we let the symbol
denotes boundary. If we let the symbol  denote the infinite number of points in the line segment [a,b], then the symbol
denote the infinite number of points in the line segment [a,b], then the symbol  denotes the two endpoints (at x = a and x = b ) of the line segment . These endpoints form the boundary of .
denotes the two endpoints (at x = a and x = b ) of the line segment . These endpoints form the boundary of .
Gradient theorem
The the gradient theorem is a direct generalization of the fundamental theorem of calculus:
![\int_{\ell[\vec p \to \vec q] \subset \mathbb R^n} \vec\nabla f\cdot d\vec\ell = f \left(\vec{q}\right)- f\left(\vec{p}\right)](../I/m/b17a67caa0a89c61e57810778155a4a4.png)
The subscript, ![\ell[\vec p \to \vec q] \subset \mathbb R^n](../I/m/9db7397fee9d74da635efc0b47e6f2df.png) informs this is an integral over the over a one-dimensinal curve (or 'path') line integral
informs this is an integral over the over a one-dimensinal curve (or 'path') line integral  from point
from point  to point
to point  . The function,
. The function,  is any scalar field that is differentiable. The expression
is any scalar field that is differentiable. The expression  informs us that
informs us that  can be a member of an n-dimensional space. (In other words the theorem is easily generalized to more than three dimensions.) A consequence of this theorem is that
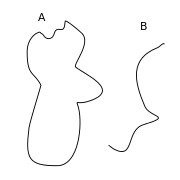
can be a member of an n-dimensional space. (In other words the theorem is easily generalized to more than three dimensions.) A consequence of this theorem is that  for any "closed curve" The figure shows the closed curve A, as well as the "open curve", B. Two endpoints form the "boundary" of curve B.
for any "closed curve" The figure shows the closed curve A, as well as the "open curve", B. Two endpoints form the "boundary" of curve B.
Stokes' theorem
Stokes' theorem states:

{kind=link}
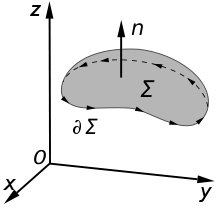
The integral subscript,  informs us that this theorem is valid only in a three-dimensional vector space. The integral is over a two-dimensional surface,Σ ,with
informs us that this theorem is valid only in a three-dimensional vector space. The integral is over a two-dimensional surface,Σ ,with  , where
, where  is normal to the surface. The integral over the surface, Σ, is nonzero only if its boundary, ∂Σ, exists. Surfaces with such boundaries are called open surfaces, and the boundary, ∂Σ, is a curve in 3-space that goes along the "edge" of the surface. This curve is integrated in the direction of positive orientation, meaning that
is normal to the surface. The integral over the surface, Σ, is nonzero only if its boundary, ∂Σ, exists. Surfaces with such boundaries are called open surfaces, and the boundary, ∂Σ, is a curve in 3-space that goes along the "edge" of the surface. This curve is integrated in the direction of positive orientation, meaning that  and the surface normal follow
and the surface normal follow  follow the right-hand rule.
follow the right-hand rule.
- Footnote: According to Wikipedia[2], this form of the theorem was first discovered by Lord Kelvin, who communicated it to George Stokes in a letter dated July 2, 1850. Stokes set the theorem as a question on the 1854 Smith's Prize exam, which led to the result bearing his name.
Divergence theorem
The divergence theorem states:
-
 .
.
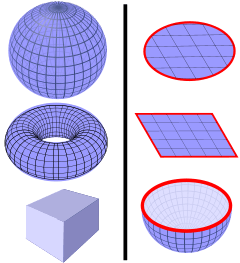
The integral subscript,  , informs us that this theorem is valid in an (arbitrary) n-dimensional vector space. The n-dimensional volume is Ω, and ∂Ω is its boundary. If n =3 dimensions, ∂Ω is a surface. Since this surface encloses a volume, it has no boundary of its own, and is therefore called a closed surface. The figure shows six surfaces. The three on the left have no boundary and are therefore closed; the ones to the right have a boundary (shown in red) and are therefore open. Note that the closed surfaces to the left are themselves boundaries volumes which are defined as what is "inside" the surface.
, informs us that this theorem is valid in an (arbitrary) n-dimensional vector space. The n-dimensional volume is Ω, and ∂Ω is its boundary. If n =3 dimensions, ∂Ω is a surface. Since this surface encloses a volume, it has no boundary of its own, and is therefore called a closed surface. The figure shows six surfaces. The three on the left have no boundary and are therefore closed; the ones to the right have a boundary (shown in red) and are therefore open. Note that the closed surfaces to the left are themselves boundaries volumes which are defined as what is "inside" the surface.
- Footnote: In index notation, the gradient theorem can be written as

- ↑ https://en.wikiversity.org/w/index.php?title=Vectors&oldid=1194637
- ↑ https://en.wikipedia.org/w/index.php?title=Stokes%27_theorem&oldid=608564969