Vectors
The basic idea
A vector is a mathematical concept that has both magnitude and direction. Detailed explanation of vectors may be found at Wikibooks linear algebra. In physics, vectors are used to describe things happening in space by giving a series of quantities which relate to the problem's coordinate system.
A vector is often expressed as a series of numbers. For example, in the two-dimensional space of real numbers, the notation (1, 1) represents a vector that is pointed 45 degrees from the x-axis towards the y-axis with a magnitude of  .
.
Commonly in physics, we use position vectors to describe where something is in the space we are considering, or how its position is changing at that moment in time. Position vectors are written as summations of scalars multiplied by unit vectors. For example:

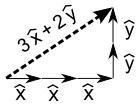
where x, y and z are scalars and  and
and  are unit vectors of the Cartesian (René Descartes) coordinate system. A unit vector is a special vector which has magnitude 1 and points along one of the coordinate frame's axes. Unit vectors for each direction can be written as either
are unit vectors of the Cartesian (René Descartes) coordinate system. A unit vector is a special vector which has magnitude 1 and points along one of the coordinate frame's axes. Unit vectors for each direction can be written as either  or
or  . The figure to the left illustrates this with
. The figure to the left illustrates this with  . A vector itself is typically indicated by either an arrow:
. A vector itself is typically indicated by either an arrow:  , or just by boldface type: v, so the vector above as a complete equation would be denoted as:
, or just by boldface type: v, so the vector above as a complete equation would be denoted as:

This velocity vector follows the convention that subscripts denote the components  of the velocity vector. Writing the components of
of the velocity vector. Writing the components of  as
as  would be more consistent but is almost never done.
would be more consistent but is almost never done.
You can find the magnitude of a vector with this formula  . For example, in two-dimensional space, this equation reduces to:
. For example, in two-dimensional space, this equation reduces to:
 .
.
For three-dimensional space, this equation becomes:
 .
.
Exercises
Find the magnitude of the following vectors.
|
|
|



|
|
|



Using vectors in physics
Many problems, particularly in mechanics, involve the use of two- or three-dimensional space to describe where objects are and what they are doing. Vectors can be used to condense this information into a precise and easily understandable form that is easy to manipulate with mathematics.
Position - or where something is, can be shown using a position vector. Position vectors measure how far something is from the origin of the reference frame and in what direction, and are usually, though not always, given the symbol  . It is usually good practice to use for position vectors when describing your solution to a problem as most physicists use this notation.
. It is usually good practice to use for position vectors when describing your solution to a problem as most physicists use this notation.
Velocity is defined as the rate of change of position with respect to time. You may be used to writing velocity, v, as a scalar because it was assumed in your solution that v referred to speed in the direction of travel. However, if we take the strict definition and apply it to the position vector, which is usually written:

Taking the time derivative:

We did not take the derivatives of the unit vectors because they are not changing. If the unit vectors are rotating, it is possible to take (vector) derivatives of them and derive the Coriolis force[1]
Two types of vectors
Free vectors
Vectors that can be described by expressing their magnitude and direction.
Localized vectors
Vectors that cannot be described completely by just specifying its magnitude and direction, but also by specifying the line along which its representative segment lies. The tails of such vectors are always fixed.
Other types of basis vectors
A vector is an object that has certain properties:
- a vector has a magnitude (or length)
- a vector has a direction.
To make the definition of the vector object more precise we may also say that vectors are objects that satisfy the properties of a vector space.
The standard notation for a vector is lower case bold type (for example  ).
).
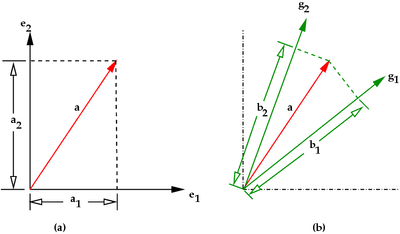
In Figure 1(a) you can see a vector  in red. This vector can be represented in component form with respect to the basis (
in red. This vector can be represented in component form with respect to the basis ( ) as
) as

where  and
and  are orthonormal unit vectors:
are orthonormal unit vectors:
 and
and 
Recall that unit vectors are vectors of length 1. These vectors are also called basis vectors. In three or more dimensions an orthonormal basis we can write

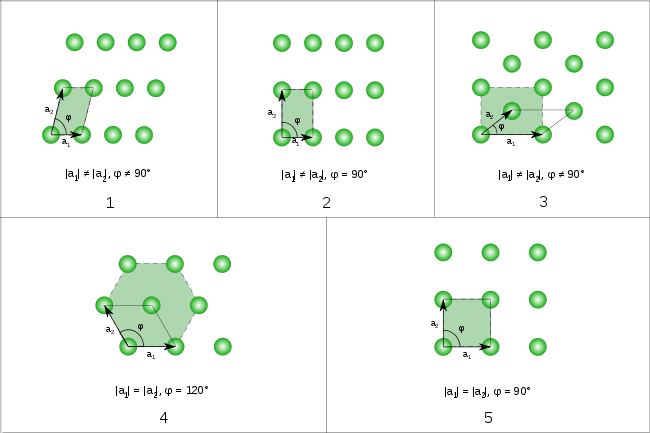
Basis vectors that are not orthonormal
You could also represent the same vector in terms of another set of basis vectors ( ) as shown in Figure 1(b):
) as shown in Figure 1(b):

In this space, the components of the vector are  , which are not equal to the projections,
, which are not equal to the projections,  that are shown in the figure. However as can be seen by inspecting the figure:
that are shown in the figure. However as can be seen by inspecting the figure:
 and
and 
In solid state physics it is convenient for the basis vectors to represent displacements among nearest neighboring atoms. The basis vectors are neither normal nor orthogonal.
Orthonormal basis vectors that are rotated
Another example of an alternative coordinate system is the rotated coordinate system:
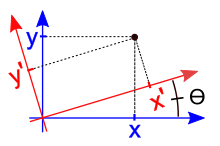
From Wikipedia[2], only a single angle is needed to specify a rotation in two dimensions – the angle of rotation, as defined in the figure. This figure depicts a passive (or alias) transformation in which the point remains stationary while the basis vectors are rotated.
While such transformations will not often be used, a deep understanding of them will yield insights relevant to relativity and quantum mechanics. It is important to know how this transformation can be derived as a matrix transformation. For that reason we will carefully derive how the primed and unprimed coordinates are related when:

We begin by considering the active (or alibi) transformation of the unit vectors. Using well known and elementary properties concerning the components of a vector, we have:


These two equations are valuable because they allow us to calculate dot products between the primed and unprimed basis vectors:

These dot products allow us to solve for any component of the primed or unprimed components of a vector. For example to find  we take the dot product with
we take the dot product with  :
:

simplifying, we have
 ,
,
and therefore,
 .
.
This result can also be obtained without using unit vectors.[3] Note how we used the dot product (also called inner product) to simplify the equations, using the property that the inner product between orthogonal vectors vanish. This concept can also be applied to infinite dimensional vector spaces, including functions, which under certain circumstances can be viewed as vectors. The results of such generalizations include Fourier transforms and the bra/ket notation of quantum mechanics.
Other permutations of this procedure yield two matrix equations:
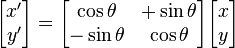 and
and 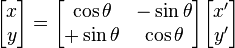 .
.
Vector Algebra Operations
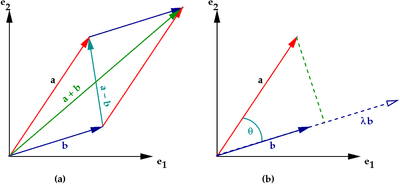
Addition and Subtraction
If and  are vectors, then the sum
are vectors, then the sum  is also a vector (see Figure 2(a)).
is also a vector (see Figure 2(a)).
The two vectors can also be subtracted from one another to give another vector  .
.
Multiplication by a scalar
Multiplication of a vector by a scalar  has the effect of stretching or shrinking the vector (see Figure 2(b)).
has the effect of stretching or shrinking the vector (see Figure 2(b)).
You can form a unit vector  that is parallel to by dividing by the length of the vector
that is parallel to by dividing by the length of the vector  . Thus,
. Thus,

Scalar product of two vectors
The scalar product or inner product or dot product of two vectors is defined as

where  is the angle between the two vectors (see Figure 2(b)).
is the angle between the two vectors (see Figure 2(b)).
If and are perpendicular to each other,  and
and  . Therefore,
. Therefore,  .
.
The dot product therefore has the geometric interpretation as the length of the projection of onto the unit vector  when the two vectors are placed so that they start from the same point.
when the two vectors are placed so that they start from the same point.
The scalar product leads to a scalar quantity and can also be written in component form (with respect to a given basis) as

If the vector is  dimensional, the dot product is written as
dimensional, the dot product is written as
Using the Einstein summation convention, we can also write the scalar product as

Also notice that the following also hold for the scalar product
 (commutative law).
(commutative law). (distributive law).
(distributive law).
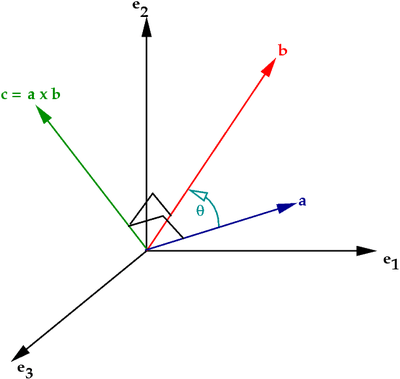
Vector product of two vectors
The vector product (or cross product) of two vectors and is another vector  defined as
defined as

where is the angle between and , and  is a unit vector perpendicular to the plane containing and in the right-handed sense (see Figure 3 for a geometric interpretation)
is a unit vector perpendicular to the plane containing and in the right-handed sense (see Figure 3 for a geometric interpretation)
In terms of the orthonormal basis  , the cross product can be written in the form of a determinant
, the cross product can be written in the form of a determinant
In index notation, the cross product can be written as

where  is the Levi-Civita symbol (also called the permutation symbol, alternating tensor).
is the Levi-Civita symbol (also called the permutation symbol, alternating tensor).
Identities from Vector Algebra
Some useful vector identities are given below.







The rest of this resource has been moved to Vector calculus.
The deleted material can be found at this permalink: https://en.wikiversity.org/w/index.php?title=Vectors&oldid=1194622
- ↑ hyperlink to: Vandegrift, G "On the derivation of Coriolis and other noninertial accelerations". American Journal of Physics 63(7)
- ↑ https://en.wikipedia.org/w/index.php?title=Rotation_(mathematics)&oldid=583263979
- ↑ http://math.sci.ccny.cuny.edu/document/show/2685