Repellor vehicles

A repellor vehicle is a vehicle (with human driver or virtual operator) that steers away from obstacles so as to arrive at a destination safely. A military vehicle, on the contrary, may wish to move toward an obstacle so as to remain undetected by keeping that object between its ultimate destination and those at the destination that may want to detect it. Overall there are three main techniques of driver interaction:
- direct user interaction,
- physical controls, and/or
- virtual controls.[1]
Attractors
“An attractor is an object which draws the user [or vehicle] towards itself ... such as a planet with a simulated [or real] gravity”.[1] “[A] planet revolving around the [S]un” is an autonomous attractor.[1] “Attractors and repellors may be ... under user”, driver (or virtual operator) control.[1]
Def. "[a]n object which draws the user [or vehicle] towards itself"[1] is called an attractor.
Attractor dynamics
“[T]he dynamic approach to path planning ... can be implemented on simple autonomous vehicles using only low-level sensory information such as distances sensed by infra-red or sonar detectors. Each sensor is assumed to contribute a repulsive force-let to a dynamical system, which generates a trajectory of heading direction.”[2] “The repulsion force is a decreasing function of sensed distance. This leads to obstacle avoidance.”[2]
This “approach ... employs the heading direction, phi, relative to some external world axis, as the planning variable. The path plan is a time course of this variable ... obtained from a differential equation of heading direction.”[2] “The sensors are arranged such that their sensitive cones just touch, thus covering completely the forward 180° semicircle.”[2]
Repellors

“A repellor pushes [a vehicle or] the user away from itself, for example, in a direction of motion which extends radially from the center of the repellor.”[1]
In the image at right, a small (~6 mm wide) piece of pyrolytic carbon is pushed away from an array of neodymium magnets with alternating polarity; i.e., diagonally identical magnetic orientation (two with north poles up and two with south poles up). The repellor vector is vertical from the central hole.
Magnetic materials and systems are able to attract or press each other apart or together with a force dependent on the magnetic field and the area of the magnets, with a defineable magnetic pressure.
The "directions in which obstacles are detected are [referred to as] local repellors.[3]
Repellors can also be unstable fixed points.[4]
A repellor either the driver or virtual controller must guard against is the formation of spurious attractors (or repellors).[5]
Transport platforms

.jpg)

For a pilot or driver, the vehicle needs to contain or be part of the pilot or driver transport.
Probably the most common pilot or driver transport is an automobile or car. It usually has an internal combustion engine that uses the expansion of burning gases to mechanically propel the transport platform.
For such a platform to leave the roadway requires additional support for the driver/pilot to survive the rugged terrain.
Occasionally automobiles are propelled above the ground for brief periods using ramps. The return usually requires reinforced suspension systems to handle the acceleration downward.
For this type of platform to remain aloft would require separate propulsion and suspension for the descent.
These platforms are often used and kept running for decades. After such lengthy periods components are likely to fall off. Some include mufflers, hub caps, mud flaps, trim, and even tires. Depending on the climate, hot, dry deserts at sufficient elevation will cause the outer paint to bleach and peel off.
An older standard-size automobile is shown in the top image at the right. Its larger size allows for passengers. It is front-wheel drive with the engine compartment (shown in the second image at the right) above the front wheels. The transmission is approximately below the battery platform (red and black terminal covers).
Maintenance of the transmission, brakes, fuel line, oil and oil filter systems usually requires undercarriage access on a lift or jacks.
The rear compartment behind the passenger cabin houses a temporary spare tire and room for luggage.
The third image at the right is a passenger's side view of the front portion of the passenger cabin. The dashboard has a relatively open vertical area in front of the stick shift mechanism. Earlier models also had a shifting lever on the steering mechanism.
The large volume in front of the stick shift may be a likely location for additional cockpit controls.
Driverless cars


At left is an image of a Volkswagen Passat that drives itself. The roof is festooned with spinning LIDAR and cameras, feeding into the server farm in the trunk. This driverless car dates from October 24, 2009.
On the right is a trunk image of the hardware needed for the Volkswagen Passat that drives itself. For this car, Junior 3, the sensors are discrete rather than festooned on the roof. This image also dates from October 24, 2009.
A driverless car is a vehicle equipped with an autopilot system, and capable of driving from one point to another without aid from an operator.
Autonomous vehicles

“An autonomous vehicle is a virtual object, such as an elevator, which, once entered by the user, automatically moves the user to a new location in the virtual world.”[1]
Notation: let the symbol AUV stand for "autonomous underwater vehicle"[6].
"An autonomous underwater vehicle (AUV) is a robot which travels underwater without requiring input from an operator. AUVs constitute part of a larger group of undersea systems known as unmanned underwater vehicles, a classification that includes non-autonomous remotely operated underwater vehicles (ROVs) – controlled and powered from the surface by an operator/pilot via an umbilical or using remote control. In military applications AUVs more often referred to simply as unmanned undersea vehicles (UUVs)."[7]
Driver assistive technologies
"There's adaptive cruise control, which keeps an eye on the car ahead and maintains a steady separation. Another system warns the driver if the car begins to stray outside its proper lane. And a few models even offer hands-free parallel parking."[8]
Pilotless hovering vehicles

At right is a digitized photograph of a micro air vehicle designed to fly over a combat area during flight. As of November 14, 2006, the MAV is in the operational test phase with military Explosive Ordnance Disposal (EOD) teams to evaluate its short-range reconnaissance capabilities.
"The small craft allows remote observation of hazardous environments inaccessible to ground vehicles. MAVs have been built for hobby purposes[9], such as aerial robotics contests and aerial photography."[10]
"The range of Reynolds numbers at which MAVs fly is similar to that of an insect or bird (103 - 105). Thus, some researchers think that understanding bird flight or insect flight will be useful to designing MAVs. The flapping motion used by birds and insects to produce lift involves aeroelasticity, which introduces structural considerations. Unsteady aerodynamics [may] also [be] present in this type of motion."[10]
Pilotless aerial vehicles



"The V-1 flying bomb ... [the] Fieseler Fi 103 is an early pulse-jet-powered predecessor of the cruise missile. ... In late 1936, ... Argus Motoren company ... had already developed a remote-controlled surveillance aircraft, the [Argus As 292] AS 292 (military designation FZG 43)."[11]
A culmination of the flying bomb effort is the SM-62 Snark shown in flight at right which is "an early-model intercontinental cruise missile that could carry a W39 thermonuclear warhead."[12] The Snark has an operational range of 10,200 km.
After the successful development of the intercontinental ballistic missile (a pilotless rocket), the Snark and its kindred are replaced by the ~1,000 km ranged cruise missile.
Sense around systems
A sense around system is one that relates to the vehicle driver or operator information from all around the vehicle so that driving or operating decisions can be made.
Collision avoidances


"In spaceflight, collision avoidance is the process of preventing a spacecraft from colliding with any other vehicle or object."[13]
"A launch window is said to have a [collision avoidance, or COLA] COLA blackout period during intervals when the vehicle cannot lift off to ensure its trajectory does not take it too close to another object already in space.[14]"[13]
"A collision avoidance manoeuvre or Debris Avoidance Manoeuvre (DAM) is an orbital manoeuvre conducted by a spacecraft to avoid colliding with another object in orbit. One is most commonly used in order to avoid a piece of space junk."[13]
"An airborne collision avoidance system (ACAS) is an aircraft system that operates independently of ground-based equipment and air traffic control in warning pilots of the presence of other aircraft that may present a threat of collision. If the risk of collision is imminent, the system indicates a manoeuvre that will reduce the risk of collision. ACAS standards and recommended practices are mainly defined in annex 10, volume IV, of the Convention on International Civil Aviation.[15]"[16]
"A distinction is increasingly being made between ACAS and ASAS (airborne separation assurance system). ACAS is being used to describe short-range systems intended to prevent actual metal-on-metal collisions. In contrast, ASAS is being used to describe longer-range systems used to maintain standard en route separation between aircraft (5 nm {9.25 km} horizontal /1000' {305 m} vertical).[17]"[16]
"A collision avoidance system is a system of sensors that is placed within a car to warn its driver of any dangers that may lie ahead on the road. Some of the dangers that these sensors can pick up on include how close the car is to other cars surrounding it, how much its speed needs to be reduced while going around a curve, and how close the car is to going off the road. The system uses sensors that send and receive signals from things like other cars, obstacles in the road, traffic lights, and even a central database are placed within the car and tell it of any weather or traffic precautions."[18]
"Toyota Motor Corporation's Pre-Collision System (PCS), the first production forward warning collision system, is used on the manufacturer's Lexus and Toyota brand vehicles. It is a radar-based system which uses a forward-facing millimeter-wave radar. When the system determines a frontal collision is unavoidable it preemptively tightens the seat belts removing any slack and pre-charges the brakes using brake assist to give the driver maximum stopping power instantly when the driver depresses the brake pedal."[19]
Propulsion systems

A propulsion system is a machine or system of machines that produces thrust to push or pull a vehicle from a position of relative rest into motion or to provide an acceleration or deceleration for a vehicle already in motion. The objective of a propulsion system is to maintain the vehicle’s ability to propel itself and maneuver. Current propulsion systems are often some form of internal-combustion engine combined with aerodynamic lifting mechanisms.
Rocket engines such as the Pixel rocket shown at right have been developed which can hover a vehicle for brief periods.
On the ground and in the air the Waterman Aerobile at left is powered by a water-cooled 120 hp (89 kW) Tucker-Franklin engine. It can fly at 112 mph (180 km/h), cruise speed of 164 km/h, maximum speed of 193 km/h, and drive at 56 mph (90 km/h), with a maximum of approximately 113 km/h.[20]
Capacitors
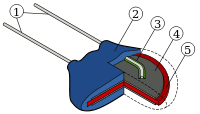
| English | |
|---|---|
| 1 | Leads |
| 2 | Dipped blue dyed phenolic coating |
| 3 | Soldered connection |
| 4 | Silver electrode |
| 5 | Ceramic dielectric |
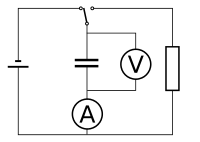
In the simple, ideal circuit on the right there is a capacitor (two equal parallel plates) with a resistor (rectangular box) and ammeter (A) in series, a voltmeter (V) in parallel, a switch (at the top) and a cell (two different length parallel plates) for charging.
A device that stores charge on one plate (thereby one charge carrier, say electrons) would first be charged by a cell using the left hand portion of the ideal circuit. When the switch is thrown to the right, electrons travel through the resistor and the ammeter (A) to neutralize the positive charge on the other parallel plate.
To prevent or greatly slow down charge drain the resistance of the resistor must be high. To have charge storage of electrons only, the positive plate must be reduced to neutral and the negative plate needs to be isolated from it.
Original research
- See also: Original research inquiry and Research
Hypothesis:
- A supercapacitor-like device can be built and loaded aboard a platform to contain about 3300 coulombs of charge to allow the platform to be repelled from the Earth's surface.
- See also: Control groups, Proof of concept, and Proof of technology
Proof of mechanism
"Incorporating tracking studies into clinical trials of cell-based therapy at the earliest stage can provide proof of mechanism of the therapy and permit evaluation of the many contributory variables, even on a patient-by-patient basis."[21]
"[B]iochemical markers [may be used] for early proof of mechanism"[22]
"One early “proof of mechanism” study of farglitazar, a non-TZD PPARγ agonist, assessed 24-h insulin and glucose profiles in a double-blind, randomized, placebo-controlled study in patients with type 2 diabetes."[23]
See also
References
- 1 2 3 4 5 6 7 Mark R. Mine (May 5, 1995). Virtual Environment Interaction Techniques. Chapel Hill, NC: University of North Carolina. pp. 18. http://staffwww.itn.liu.se/~karlu/courses/TNM086/papers/VEinteractionTechniques.pdf. Retrieved 2012-03-09.
- 1 2 3 4 Estela Bicho, Pierre Mallet, Gregor Schöner (August 31-September 4 1998). Using Attractor Dynamics to Control Autonomous Vehicle Motion, In: ‘’Proceedings of the 24th Annual conference of the IEEE, volume 2’’. Aachen, Germany: IEEE Industrial Electronics Society. pp. 1176-81. doi:10.1109/IECON.1998.724266. ISBN 0-7803-4503-7. http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.195.6459&rep=rep1&type=pdf. Retrieved 2012-03-08.
- ↑ Hendrik Reimann, Ioannis Iossifidis, and Gregor Schöner (June 2010). End-effector obstacle avoidance using multiple dynamic variables, In: Robotics (ISR), 2010 41st International Symposium on and 2010 6th German Conference on Robotics (ROBOTIK). VDE Publishing House. pp. 1-6. ISBN 978-3-8007-3273-9. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=5756798. Retrieved 2013-07-18.
- ↑ Philipp Althaus, Henrik I. Christensen, F. Hoffman (August 2001). Using the Dynamical System Approach to Navigate in Realistic Real-World Environments, In: Intelligent Robots and Systems. IEEE/RSF. pp. 1023-9. doi:10.1109/IROS.2001.976303.
- ↑ EW Large (July 1997). "Scaling the dynamical systems approach to path planning". Industrial Electronics 1: SS21-6. doi:10.1109/ISIE.1997.651729. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=651729. Retrieved 2013-07-19.
- ↑ "AUV, In: Wikipedia". San Francisco, California: Wikimedia Foundation, Inc. March 26, 2012. Retrieved 2012-07-03.
- ↑ "Autonomous underwater vehicle, In: Wikipedia". San Francisco, California: Wikimedia Foundation, Inc. June 16, 2012. Retrieved 2012-07-03.
- ↑ Brian Hayes (September-October 2011). "Leave the Driving to It". American Scientist 99 (5): 362-7. http://online.qmags.com/AMS0911?sessionID=44E632D3BEE2EC4B5597CA75A&cid=1902739&eid=16529. Retrieved 2012-05-27.
- ↑ MAV multicopter hobby project "Shrediquette BOLT", http://shrediquette.blogspot.de/p/shrediquette-bolt.html
- 1 2 "Micro air vehicle, In: Wikipedia". San Francisco, California: Wikimedia Foundation, Inc. May 14, 2012. Retrieved 2012-07-03.
- ↑ "V-1 flying bomb, In: Wikipedia". San Francisco, California: Wikimedia Foundation, Inc. July 2, 2012. Retrieved 2012-07-03.
- ↑ "SM-62 Snark, In: Wikipedia". San Francisco, California: Wikimedia Foundation, Inc. July 1, 2012. Retrieved 2012-07-03.
- 1 2 3 "Collision avoidance (spacecraft), In: Wikipedia". San Francisco, California: Wikimedia Foundation, Inc. March 18, 2013. Retrieved 2013-07-19.
- ↑ "Mission Status Center - Delta 313 Launch Report". Spaceflight Now.
- ↑ http://www.eurocontrol.int/msa/public/standard_page/ACAS_ICAO_Provisions.html
- 1 2 "Airborne collision avoidance system, In: Wikipedia". San Francisco, California: Wikimedia Foundation, Inc. February 27, 2013. Retrieved 2013-07-19.
- ↑ [Hoekstra, J.M. (2002). Free flight with airborne separation assurance. Report No. NLR-TP-2002-170. National Aerospace Laboratory NLR.]
- ↑ "Collision avoidance system, In: Wikipedia". San Francisco, California: Wikimedia Foundation, Inc. July 4, 2012. Retrieved 2012-07-04.
- ↑ "Collision avoidance system, In: Wikipedia". San Francisco, California: Wikimedia Foundation, Inc. July 18, 2013. Retrieved 2013-07-19.
- ↑ "Waterman Arrowbile, In: Wikipedia". San Francisco, California: Wikimedia Foundation, Inc. June 12, 2013. Retrieved 2013-07-19.
- ↑ M. Thompson, D. M. Wall, R. J. Hicks, H. M. Prince (December 2005). "In vivo tracking for cell therapies". The Quarterly Journal of Nuclear Medicine and Molecular Imaging 49 (4): 339-48. PMID 16407817. http://www.minervamedica.it/index2.t?show=R39Y2005N04A0339. Retrieved 2012-01-03.
- ↑ Sherif Daouti, Brian Higgins, Kenneth Kolinsky, Kathryn Packman, Huisheng Wang, Christine Rizzo, John Moliterni, Nicholas Huby, Nader Fotouhi, Mei Liu, Petra Goelzer, Harpreet K. Sandhu, Jia Kui Li, Aruna Railkar, David Heimbrook and Huifeng Niu (January 2010). "Preclinical In vivo Evaluation of Efficacy, Pharmacokinetics, and Pharmacodynamics of a Novel MEK1/2 Kinase Inhibitor RO5068760 in Multiple Tumor Models". Molecular Cancer Therapeutics 9 (1): 134-44. doi:10.1158/1535-7163.MCT-09-0601. PMID 20053779. http://mct.aacrjournals.org/cgi/pmidlookup?view=long&pmid=20053779. Retrieved 2012-01-03.
- ↑ John A. Wagner (December 2002). "Early clinical development of pharmaceuticals for type 2 diabetes mellitus: from preclinical models to human investigation". The Journal of Clinical Endocrinology & Metabolism 87 (12): 5362-6. doi:10.1210/jc.2002-020910. PMID 12466321. http://jcem.endojournals.org/content/87/12/5362.full.pdf+html. Retrieved 2012-01-03.
Further reading
- Mark R. Mine (May 5, 1995). Virtual Environment Interaction Techniques. Chapel Hill, NC: University of North Carolina. pp. 18. http://staffwww.itn.liu.se/~karlu/courses/TNM086/papers/VEinteractionTechniques.pdf. Retrieved 2012-03-09.
External links
- African Journals Online
- Bing Advanced search
- Google Books
- Google scholar Advanced Scholar Search
- JSTOR
- Lycos search
- NASA's National Space Science Data Center
- NCBI All Databases Search
- Office of Scientific & Technical Information
- Questia - The Online Library of Books and Journals
- SAGE journals online
- The SAO/NASA Astrophysics Data System
- Scirus for scientific information only advanced search
- Spacecraft Query at NASA.
- SpringerLink
- Taylor & Francis Online
- Wiley Online Library Advanced Search
- Yahoo Advanced Web Search
| ||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||
![]() This is a research project at http://en.wikiversity.org
This is a research project at http://en.wikiversity.org
| |
Educational level: this is a research resource. |
| |
Resource type: this resource is an article. |
| |
Resource type: this resource contains a lecture or lecture notes. |
| |
Subject classification: this is a technology resource . |