Physics equations/06-Uniform Circular Motion and Gravitation/A:proofs
Three proofs are offered for the acceleration of uniform circular motion. A fourth proof involves Kepler's third law, which was used by Newton to conclude that the force law was an inverse-square law.
- The first uses geometry and for that reason represents a simplified version of how Newton presented the concept to the world.
- The second[1] uses calculus; this proof is actually easier to learn than the geometrical proof.
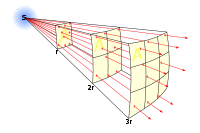
- The inverse square law can be deduced from Kepler's third law. But the inverse square law has deep consequences that allow for Maxwell's equations to exist. This latter statement is not easy to establish, so for now we simply point out the geometric relationship between gravity and butterguns.
- An advanced discussion allows for curvilinear motion that is neither circular nor uniform; this proof uses methods associated with general relativity.
Geometrical proof of equation for uniform circular motion
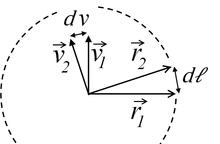
Using the figure we define the distance traveled by a particle during a brief time interval,  , and the (vector) change in velocity:
, and the (vector) change in velocity:
1  , and
, and 
2  (rate times time equals distance).
(rate times time equals distance).
3  (definition of acceleration).
(definition of acceleration).
4  (taking the absolute value of both sides).
(taking the absolute value of both sides).
5  (by similar triangles). Substituting (2) and (4) yields:
(by similar triangles). Substituting (2) and (4) yields:
6  , which leads to
, which leads to  , and therefore:
, and therefore:
7 
CALCULUS-based proof of formula for uniform circular motion
Let 
Take the derivative twice to get first  then
then  :
:


Otain the desired result by taking the magnitude of each vector (i.e. a = (ax2+ay2)1/2).
Derivation of Kepler's third law from the inverse square law
Kepler's third law for circular orbits states that when an object orbits a massive central body, the cube of the distance is proportional to the square of the period. Newton showed that the proportionality constant is proportional to M, the mass of the central body. This allows one to deduce the mass of a planet from the motion of its moons. A generalization to the case where the mass ratio is not large (or small) allows us to deduce the mass of both stars in a binary star system.
-
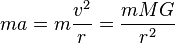 , where m is the mass of the orbiting object, and M>>m is the mass of the central body, and r is the radius (assuming a circular orbit).
, where m is the mass of the orbiting object, and M>>m is the mass of the central body, and r is the radius (assuming a circular orbit). -
 , where m is the mass of the orbiting object, and M>>m is the mass of the central body, and r is the radius (assuming a circular orbit). After some algebra:
, where m is the mass of the orbiting object, and M>>m is the mass of the central body, and r is the radius (assuming a circular orbit). After some algebra: -
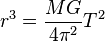
A reveral of these steps allows one to derive the inverse square law from Kepler's third law.
CALCULUS-based (and very advanced) proof of formula for general case (curvilinear motion)
Notational issues with the displacement (r) vector
- It is often convenient to write vectors in component form, without unit vectors, for example:
![\vec{r} (t) = \left[\,(x(t), y(t), z(t)\,\right]](../I/m/61c686862ac9debbce5f0bebfaea3554.png)
- The
 is unique in that it's components are not
is unique in that it's components are not ![[r_x, r_y,r_z]](../I/m/61e11679c6e1ab13cf0d567d4e63615c.png)
- There exists an irreparable ambiguity regarding differential's of vectors. It is universally recognized that
 represents the differential of the magnitude,
represents the differential of the magnitude,  . On the other hand, in uniform circular motion,
. On the other hand, in uniform circular motion,  is a constant, so it might be more convenient (on board or paper) to write
is a constant, so it might be more convenient (on board or paper) to write  as
as  . So, should we write such non-standard notation into text?
. So, should we write such non-standard notation into text?
Rigorous discussion of acceleration along a curved path
Here we prove that the acceleration of a particle consists of two parts:
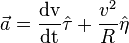
where  and
and  are unit vectors (called eta-hat and tau-hat); points tangential to the path, and points to the center of curvature (perpendicular to ). The distance to the center of curvature is R. It is common to use the symbol
are unit vectors (called eta-hat and tau-hat); points tangential to the path, and points to the center of curvature (perpendicular to ). The distance to the center of curvature is R. It is common to use the symbol  to denote a small change in position. Using component notation for vectors:
to denote a small change in position. Using component notation for vectors:
![\rm d\vec{\ell} \equiv \rm d\vec{r}= \left[\,\rm dx, \rm dy, \rm dz\,\right]](../I/m/68bc3a818977275ccd2b3224b9e9d8ad.png) .
.
Some authors[2][3]refer to this as  . The scalar magnitude is:
. The scalar magnitude is:

It is convenient to use dots to denote differential with respect to time:
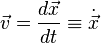

Note that 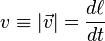 . Next we define the tangent unit vector , as a unit vector parallel to the velocity:
. Next we define the tangent unit vector , as a unit vector parallel to the velocity:

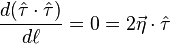
We now show that the differential of is normal (perpendicular) to . We begin by defining the  vector as follows:
vector as follows:

Since (by definition of unit vector) the derivative of  vanishes, we have:
vanishes, we have:
What makes  and
and  interesting is that they depend only on the path taken by the particle through space, and not on the rate (speed) at which the particle takes this path. Define the magnitude of
interesting is that they depend only on the path taken by the particle through space, and not on the rate (speed) at which the particle takes this path. Define the magnitude of  to be
to be  , so that:
, so that:
 .
.
Thus, we can take the derivative of velocity,  , as the derivative of the product of two terms:
, as the derivative of the product of two terms:
 .
.
This means first that a particle never accelerates in any direction except the normal or the tangent (or of course a combination of both). That is, it never accelerates at all in the  direction. Furthermore, the acceleration in the tangent direction changes speed and only speed, whereas acceleration in the normal direction changes direction and only direction. To discern the meaning of , we consider a particle making uniform circular motion about a circle of radius R. In x-y space,
direction. Furthermore, the acceleration in the tangent direction changes speed and only speed, whereas acceleration in the normal direction changes direction and only direction. To discern the meaning of , we consider a particle making uniform circular motion about a circle of radius R. In x-y space,
![\vec r = [R\cos\omega t, R\sin\omega t]](../I/m/68f4b4dcafa98844b321398f954f58f5.png)
It can be shown that (called the curvature) is given by,

Proving this last step is left as an exercise for the reader/editor.
References
- ↑ Wikiooks Physics with Calculus
- ↑ https://en.wikibooks.org/w/index.php?title=Physics_with_Calculus/Mechanics/Rotational_Motion&oldid=1571977
- ↑ https://en.wikipedia.org/w/index.php?title=Geodesics_in_general_relativity&oldid=577980042