Nonlinear finite elements/Homework 7/Hints
< Nonlinear finite elements < Homework 7Hints 1: Index notation
Index notation:

If 
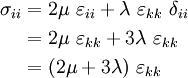

Dummy indices are replaceable.
Hint 2: Index notation
Index notation:
Multiply by  :
:
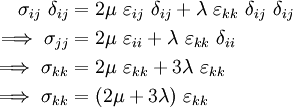
Multiplication by leads to replacement of one index.

Hint 3: Index notation
Index notation:
From the definition of dyadic product, we can show

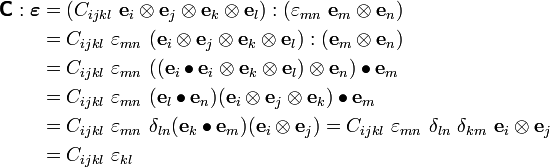
Contraction gives:
Hint 4: Tensor product
Index notation:
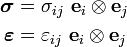
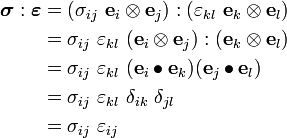
Definition of dyadics products:
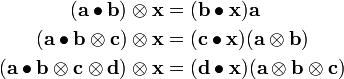
We can show that

Contraction gives:
Hint 5 : Tensor product
Tensor Product of two tensors:
Tensor product:

Hint 6: Vector transformations
Change of basis: Vector transformation rule

 are the direction cosines.
are the direction cosines.
In matrix form

Other common form: Vector transformation rule

In matrix form

Hint 7: Tensor transformations
Change of basis: Tensor transformation rule
where are the direction cosines.
In matrix form,

Other common form
In matrix form,
This article is issued from Wikiversity - version of the Tuesday, January 08, 2008. The text is available under the Creative Commons Attribution/Share Alike but additional terms may apply for the media files.