Introduction to Elasticity/Kinematics example 3
< Introduction to ElasticityExample 3
Given:
Unit square ![(X_1,X_2) \in [0,1]](../I/m/05f971f29da7ee6af78c67dd11834807.png) with displacement fields :
with displacement fields :
 .
. .
. .
.
Sketch:
Deformed configuration in  plane.
plane.
Solution
The displacement  . Hence,
. Hence,  . In the reference configuration,
. In the reference configuration,  and
and  . Hence, in the
. Hence, in the  plane, the initial square is the same shape as the unit square in the
plane, the initial square is the same shape as the unit square in the  plane. We can use Maple to find out the values of
plane. We can use Maple to find out the values of  and
and  after the deformation
after the deformation  .
.
with(linalg):</code>
X := array(1..3): x := array(1..3): u = array(1..3):
e1 := array(1..3,[1,0,0]):
e2 := array(1..3,[0,1,0]): e3 = array(1..3,[0,0,1]):
ua := evalm(k*X[2]*e1 + k*X[1]*e2):
ub := evalm(-k*X[2]*e1 + k*X[1]*e2);
uc := evalm(k*X[1]^2*e2);
![\mathit{ua} := \left[ k{X_{2}}, k{X_{1}}, 0 \right]](../I/m/1a83b23bea40b0a016ad51fd81f729b8.png)
![\mathit{ub} := \left[ - k{X_{2}}, k{X_{1}}, 0 \right]](../I/m/0f374897380256a50b0cdc16715f1eea.png)
![\mathit{uc} := \left[ 0, k{X_{1}}^{2}, 0 \right]](../I/m/fd846d76c5d7c611ade23cdb30bda602.png)
xa := evalm(ua + X);
xb := evalm(ub + X);
xc := evalm(uc + X);</code>
![\mathit{xa} := \left[ k{X_{2}} + {X_{1}}, k{X_{1}} + {X_{2}}, {X_{3}} \right]](../I/m/9cd61d0bd0ab629a0fb22f49dc51e41d.png)
![\mathit{xb} := \left[ - k{X_{2}} + {X_{1}}, k{X_{1}} + {X_{2}}, {X_{3}} \right]](../I/m/37cffc97125185ac6bae74fefcd485a6.png)
![\mathit{xc} := \left[ {X_{1}}, k{X_{1}}^{2} + {X_{2}}, {X_{3}} \right]](../I/m/c6ea28a03fe03a4e6d9ede51a12260ff.png)
Plots of the deformed body are shown below
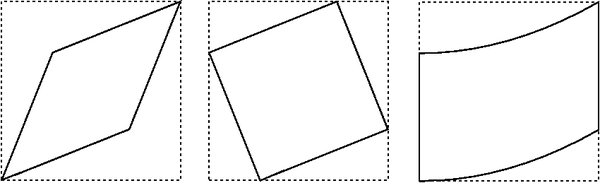 Deformed shapes |
This article is issued from Wikiversity - version of the Monday, February 01, 2016. The text is available under the Creative Commons Attribution/Share Alike but additional terms may apply for the media files.