Introduction to Elasticity/Hertz contact
< Introduction to ElasticityThe Hertz Problem: Rigid Cylindrical Punch
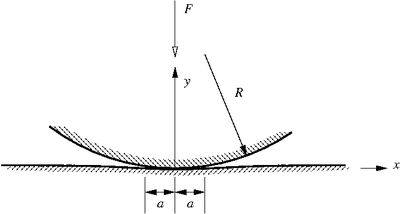 Hertz indentation |
- The contact length
 depends on the load
depends on the load  .
. - There is no singularity at
 .
. - The radius of the cylinder (
 ) is large.
) is large.
We have,

Hence,

and
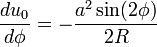
Therefore,

and

Plug back into the expression for  to get
to get

This expression is singular at  and
and  , unless we choose
, unless we choose

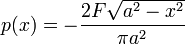
Plugging into the equation for ,

Two deformable cylinders
If instead of the half-plane we have an cylinder; and instead of the
rigid cylinder we have a deformable cylinder, then a similar approach
can be used to obtain the contact length 

and the force distribution 
This article is issued from Wikiversity - version of the Wednesday, August 08, 2007. The text is available under the Creative Commons Attribution/Share Alike but additional terms may apply for the media files.