Introduction to Elasticity/Equilibrium example 2
< Introduction to ElasticityExample 2
Given: The displacement equation of equilibrium for an isotropic inhomogeneous linear elastic material can be written as

where

and  and
and  are the Lamé moduli.
are the Lamé moduli.
Show:
Show that the displacement equation of equilibrium can be expressed as

Solution
The skew part of the tensor  does not affect the stress because it leads to a rigid displacement field. Therefore, the displacement equation of equilibrium may be written as
does not affect the stress because it leads to a rigid displacement field. Therefore, the displacement equation of equilibrium may be written as
![\boldsymbol{\nabla} \bullet \left[\mathbf{C} : \text{symm}(\boldsymbol{\nabla}\mathbf{u})\right] + \mathbf{b} = 0](../I/m/1702f5006acb0d0f47df760ebf9c3440.png)
where

In index notataion,

and

Therefore,

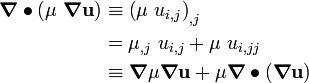
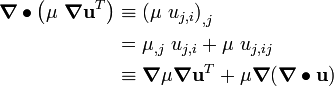
Now,

Hence,

Taking the divergence,
![\begin{align}
\boldsymbol{\nabla}\bullet{\left[\mathbf{C} : \text{symm}(\boldsymbol{\nabla}\mathbf{u})\right]} & =
\boldsymbol{\nabla}\bullet{\left[\lambda~(\boldsymbol{\nabla}\bullet\mathbf{u})\mathbf{1} + \mu~(\boldsymbol{\nabla}\mathbf{u} + \boldsymbol{\nabla}\mathbf{u}^T)\right]} \\
& = \boldsymbol{\nabla}\bullet{\left[\lambda~(\boldsymbol{\nabla}
\bullet\mathbf{u})\mathbf{1}\right]} +
\boldsymbol{\nabla}\bullet{\left(\mu~\boldsymbol{\nabla}\mathbf{u}\right)} +
\boldsymbol{\nabla}\bullet{\left(\mu~\boldsymbol{\nabla}\mathbf{u}^T\right)}
\end{align}](../I/m/cdc63c5bd5a4a8fe1f8e6281de6f83da.png)
Recall that
Therefore,
![\begin{align}
\boldsymbol{\nabla}\bullet{\left[\lambda~(\boldsymbol{\nabla}
\bullet\mathbf{u})\mathbf{1}\right]} &
\equiv \left(\lambda~u_{k,k}\delta_{ij}\right)_{,j} \\
& = \lambda_{,i}~u_{k,k} + \lambda~u_{k,ki} \\
& \equiv \boldsymbol{\nabla}{\lambda}(\boldsymbol{\nabla}\bullet\mathbf{u}) + \lambda\boldsymbol{\nabla}{(\boldsymbol{\nabla}\bullet\mathbf{u})}
\end{align}](../I/m/8200d709405f2b7d5e0713561db58410.png)
Hence,
![\begin{align}
\boldsymbol{\nabla}\bullet{\left[\mathbf{C} : \text{symm}(\boldsymbol{\nabla}\mathbf{u})\right]}
& = \boldsymbol{\nabla}{\lambda}(\boldsymbol{\nabla}
\bullet\mathbf{u}) + \lambda\boldsymbol{\nabla}{(\boldsymbol{\nabla}\bullet\mathbf{u})} +
\boldsymbol{\nabla}{\mu} \boldsymbol{\nabla}\mathbf{u} + \mu\boldsymbol{\nabla}\bullet{(\boldsymbol{\nabla}\mathbf{u})} +
\boldsymbol{\nabla}{\mu} \boldsymbol{\nabla}\mathbf{u}^{T} + \mu\boldsymbol{\nabla}{(\boldsymbol{\nabla}\bullet\mathbf{u})} \\
& = \mu\boldsymbol{\nabla}\bullet{(\boldsymbol{\nabla}\mathbf{u})} + (\lambda+\mu)\boldsymbol{\nabla}{(\boldsymbol{\nabla}\bullet\mathbf{u})} +
\boldsymbol{\nabla}{\mu}\left(\boldsymbol{\nabla}\mathbf{u} + \boldsymbol{\nabla}\mathbf{u}^{T}\right) +
\boldsymbol{\nabla}{\lambda}(\boldsymbol{\nabla}\bullet \mathbf{u})
\end{align}](../I/m/d5f96dbba6b7bba7a844b5ada801783a.png)
Therefore, the displacement equation of equilibrium can be expressed as required, i.e,
This article is issued from Wikiversity - version of the Saturday, February 13, 2016. The text is available under the Creative Commons Attribution/Share Alike but additional terms may apply for the media files.