Introduction to Elasticity/Constitutive relations
< Introduction to ElasticityConstitutive relations
Any problem in elasticity is usually set up with the following components:
- A strain-displacement relation.
- A traction-stress relation.
- Balance laws for linear and angular momentum in terms of the stress.
To close the system of equations, we need a relation between the stresses and strains. Such a relation is called a constitutive equation.
Isotropic elasticity
The most popular form of the constitutive relation for linear elasticity (see, for example, Strength of materials) is the following relation that holds for isotropic materials:
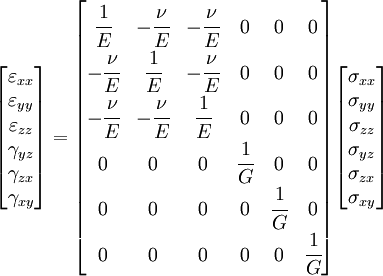
where  is the Young's modulus,
is the Young's modulus,  is the Poisson's ratio and
is the Poisson's ratio and  is the shear modulus. The shear modulus can be expressed in terms of the Young's modulus and Poisson's ratio as
is the shear modulus. The shear modulus can be expressed in terms of the Young's modulus and Poisson's ratio as
The shear modulus is also often represented by the symbol  . We will use and interchangeably in this discussion.
. We will use and interchangeably in this discussion.
Engineering shear strain and tensorial shear strain
In the above matrix equation we have used  to represent the shear strains rather that
to represent the shear strains rather that  . You should keep in mind that
. You should keep in mind that

An alternative form of the stress-strain relation
An alternative form of the isotropic linear elastic stress-strain relation that is easier to work with is:

or, in index notation,

Here  is the Lamé modulus and is the shear modulus. In terms of and :
is the Lamé modulus and is the shear modulus. In terms of and :

The inverse relationship is

or, in index notation,

The stiffness and compliance tensors
For hyperelastic materials, the stress and strain of a linear elastic material are such that one can be derived from a stored energy potential function of the other (also called a strain energy density function). Therefore, we can define an elastic material to be one which satisfies

where  is the strain energy density function.
is the strain energy density function.
If the material, in addition to being elastic, also has a linear stress-strain relation then we can write

The quantity  is called the stiffness tensor or the elasticity tensor.
is called the stiffness tensor or the elasticity tensor.
Therefore, the strain energy density function has the form (this form is called a quadratic form)

Clearly, the elasticity tensor has 81 components (think of a  matrix because the stresses and strains have nine components each). However, the symmetries of the stress tensor implies that
matrix because the stresses and strains have nine components each). However, the symmetries of the stress tensor implies that
This reduces the number independent components of  to 54 (6 components for the
to 54 (6 components for the  term and 3 each for the
term and 3 each for the  terms.
terms.
Similarly, using the symmetry of the strain tensor we can show that

These are called the minor symmetries of the elasticity tensor and we are then left with only 36 components that are independent.
Since the strain energy function should not change when we interchange and  in the quadratic form, we must have
in the quadratic form, we must have
This reduces the number of independent constants to 21 (think of a symmetric  matrix). These are called the major symmetries of the stiffness tensor.
matrix). These are called the major symmetries of the stiffness tensor.
The inverse relation between the strain and the stress can be determined by taking the inverse of stress-strain relation to get

where  is the compliance tensor. The compliance tensor also has 21 components and the same symmetries as the stiffness tensor.
is the compliance tensor. The compliance tensor also has 21 components and the same symmetries as the stiffness tensor.
Voigt notation
To express the general stress-strain relation for a linear elastic material in terms of matrices (as we did for the isotropic elastic material) we use what is called the Voigt notation.
In this notation, the stress and strain are expressed as  column vectors and the elasticity tensor is expressed as a symmetric matrix as shown below.
column vectors and the elasticity tensor is expressed as a symmetric matrix as shown below.
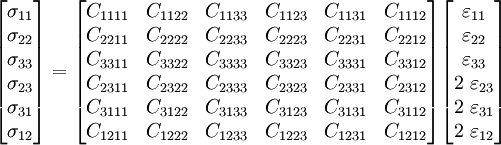
or

The inverse relation is
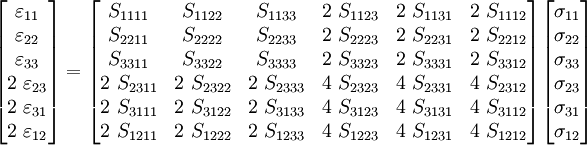
or

We can show that

Isotropic materials
We have already seen the matrix form of the stress-strain equation for isotropic linear elastic materials. In this case the stiffness tensor has only two independent components because every plane is a plane of elastic symmetry. In direct tensor notation

where and are the elastic constants that we defined before,  is the second-order identity tensor, and
is the second-order identity tensor, and
 is the symmetric fourth-order identity tensor. In index notation
is the symmetric fourth-order identity tensor. In index notation

You could alternatively express this equation in terms of the Young's modulus () and the Poisson's ratio () or in terms of the bulk modulus ( ) and the shear modulus () or any other combination of two independent elastic parameters.
) and the shear modulus () or any other combination of two independent elastic parameters.
In Voigt notation the expression for the stress-strain law for isotropic materials can be written as
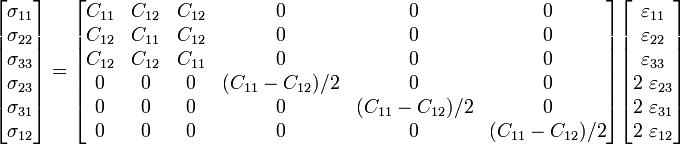
where

The Voigt form of the strain-stress relation can be written as
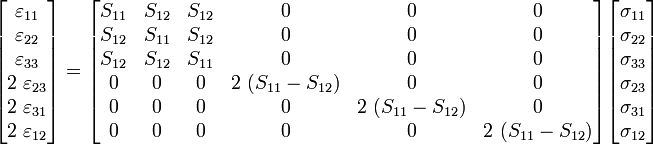
where

The relations between various moduli are shown in the table below:
 |
 |
 |
 |
 |
 |
 |
 |
 | |
|---|---|---|---|---|---|---|---|---|---|
| |
 |
- | - | - |  |
 |
 |
 |
 |
| |
- |  |
- |  |
- | - |  |
 |
 |
| |
- | - |  |
 |
 |
 |
- | - |  |
| |
 |
 |
 |
 |
- |  |
- |  |
- |
| |
 |
 |
 |
- |  |
- |  |
- | - |