Cross product
| |
Subject classification: this is a mathematics resource . |
| |
Subject classification: this is a physics resource . |
| |
Educational level: this is a secondary education resource. |
| |
Educational level: this is a tertiary (university) resource. |
The cross product, also known as the "vector product", is a vector associated with a pair of vectors in 3-dimensional space.
Geometric Definition
The cross product is written with a "times sign"[1]
between the vectors. Letting  be the cross product of
be the cross product of  "times"
"times"  , we have:
, we have:

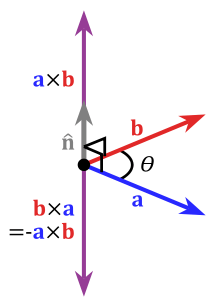
The magnitude of is product of the lengths of the two vectors times the sine of the angle between them:
 ,
,
where  and
and  , and
pointing in the direction perpendicular to the plane formed by the two vectors:
, and
pointing in the direction perpendicular to the plane formed by the two vectors:
This leaves an ambiguity—it could point in either of two opposite directions. The ambiguity is resolved by the "right hand rule"—if the fingers of the right hand (except the thumb) are curled as if to depict the rotation of the first vector into the second (following the angular direction of the smallest angle between them), then the thumb points in the direction of the cross product.
A few properties can be deduced from this definition:
- It is homogeneous in each argument:
 .
. - If the two vectors point in the same direction, or opposite directions, their cross product is zero. This is because the sine of 0° or 180° is zero. It is fortunate that this is so, because the right hand rule couldn't be applied in that case.
- The cross product of two vectors is perpendicular to each of those vectors.
- It is anticommutative:
 .
. - The cross product has an intrinsic "handedness" or chirality, due to the use of the right hand rule. If one looks in a mirror at two vectors and their cross product, the cross product will appear to point in the wrong direction.
Algebraic Definition
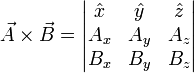
The cross product has a remarkable, convenient, and elegant algebraic formulation. If the components of a vector in 3-dimensional Cartesian space are given with subscripts:  ,
,  , and
, and  , then the cross product of vectors
, then the cross product of vectors  and
and  is given by:
is given by:



- It needs to be emphasized that this formula only works if the components of the vectors are described in Cartesian space. In other coordinate systems, it may be necessary to use other, more complicated formulas.
This can be put into a particularly convenient and easy-to-remember form through the use of determinants.
Letting  ,
,  , and
, and  be the Cartesian unit basis vectors,
and taking a slight liberty in the meaning of multiplication, we have:
be the Cartesian unit basis vectors,
and taking a slight liberty in the meaning of multiplication, we have:
The theory of determinants tells us that the determinant changes sign if any two rows of the matrix are exchanged, so swapping the two vectors changes the sign—the cross product is anticommutative. The theory of determinants also tells us that it is homogeneous. One can also work out that it is distributive:

Equivalence of the two Definitions
 .
.It is important to prove that the geometric and algebraic definitions of the cross product are the same. The proof is somewhat difficult. First, we need a few lemmas, that is, preliminary theorems.
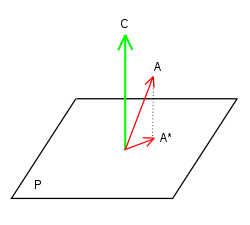
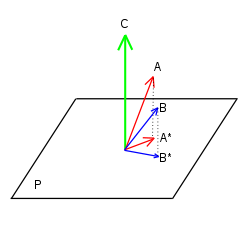
Notation: We will use a fixed vector  throughout. Consider the plane perpendicular to
. The projection of any other vector (say ) onto will be denoted
throughout. Consider the plane perpendicular to
. The projection of any other vector (say ) onto will be denoted
 . See Figure 1.
. See Figure 1.
- What if is zero? Its perpendicular plane is undefined. But in that case the lemma we are trying to prove (distributivity) will be trivially true.
 and give the same cross product.
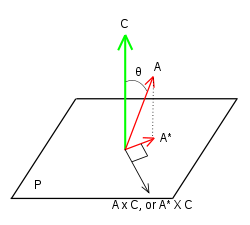
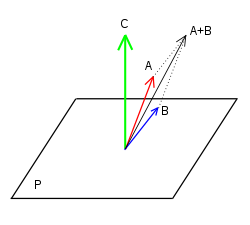
and give the same cross product.Lemma 1: Using the geometric definition of the cross product:

Proof: Let  be the angle between and .
We have:
be the angle between and .
We have:

Since is perpendicular to , we have:

So they have the same length. Also,  and
and  point in the same direction,
the direction perpendicular to the plane formed by and . See Figure 2.
point in the same direction,
the direction perpendicular to the plane formed by and . See Figure 2.
Q.E.D.
Lemma 2: Letting be another vector:

Proof: We use the "parallelogram rule" for vector addition. In perspective, the vectors might look like Figures 3 and 4.
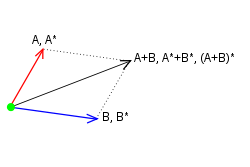
But if we look directly down on the plane,
and are the same, as are
and  , and
, and
 and
and  .
.
Q.E.D.
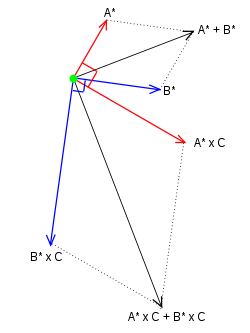
Lemma 3: The cross product, using the geometric definition, obeys the distributive law:
Proof:
If we look directly down on the plane perpendicular to C, we can once again see the
addition of and as shown in Figure 5. If we
rotate that diagram clockwise by 90° and scale by the length of
, we get the cross products of all those vectors with C, as shown in Figure 6.
Those cross products all lie in the plane perpendicular to C, and the addition
of  , by the parallelogram rule, is faithfully carried over into the addition of
, by the parallelogram rule, is faithfully carried over into the addition of
 .
.
This shows that

By lemma 2, this becomes

And by lemma 1, this becomes

Q.E.D.
By the antisymmetry of the cross product, it is also distributive in the second argument:

Theorem: The geometric and algebraic definitions of the cross product are the same.
Proof: Let the vectors and be expressed as linear combinations of the Cartesian unit basis vectors , , and :


(The numbers  are the components of the two vectors.)
are the components of the two vectors.)
By lemma 3, and linearity, we can expand the cross product:







Now inspection of the cross products of the basis vectors, using the geometric definition and the right hand rule, shows that:



So

which is the same as the algebraic definition.
Q.E.D.
Footnotes and References
- ↑ A real, old-fashioned, times sign. Not an asterisk.