Continuum mechanics/Functions
< Continuum mechanics-- Back to Nonlinear finite elements --
There are certain terms involving relationships between functions that you will often encounter in papers dealing with finite elements and continuum mechanics. We list some of the basic terms that you will see. More details can be found in books on advanced calculus and functional analysis.
Functions
Let  and
and  be two sets. A function is a rule that assigns to
each
be two sets. A function is a rule that assigns to
each  an element of . A function is usually denoted by
an element of . A function is usually denoted by

Sometimes, one also writes

For example, if the function is  , then we may write
, then we may write
 .
.
Domain and Range
For a function  , the set is called the
domain of
, the set is called the
domain of  . See Figure 1.
. See Figure 1.
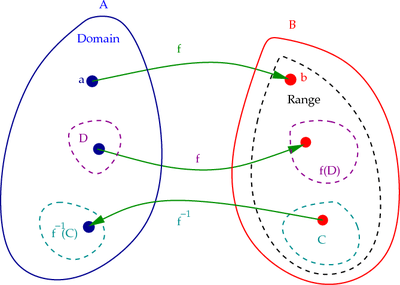 Figure 1. Domain and range of a function. |
The range of is the set

Therefore,  .
.
One-to-one mapping (injection)
A function is called one-to-one
(or an injection) if no two distinct elements of are mapped to
the same element of .
Onto mapping (surjection)
A function is called onto if for every
 there is an such that
there is an such that  .
.
If that case,  .
.
One-to-one and onto mapping (bijection)
When a mapping is both one-to-one and onto it is called a bijection.
For example, if and with

the map is one-to-one and onto.
On the other hand if

the map is one-to-one but not onto.
If we choose

the map is neither one-to-one nor onto.
Image, pre-image, and inverse functions
Suppose we have a function . Let  be a subset
of (see Figure~1). Let us define
be a subset
of (see Figure~1). Let us define

Then,  is called the image of .
is called the image of .
On the other hand, if  is a subset of and we define
is a subset of and we define

Then,  is called the inverse image or pre-image
of .
is called the inverse image or pre-image
of .
If is one-to-one and onto, then there is a
unique function 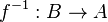 such that
such that

The function  is called an inverse function of .
is called an inverse function of .
Identity map
The map  such that
such that  for all
for all  is called
the identity map. This map is one-to-one and onto.
is called
the identity map. This map is one-to-one and onto.
Composition
A notation that you will commonly see in papers on nonlinear solid mechanics is the composition of two functions. See Figure 2.
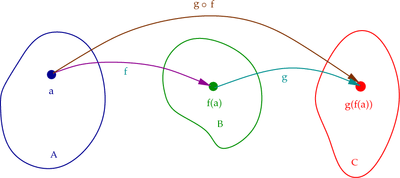 Figure 2. Composition of functions. |
Let and  be two functions such that and
be two functions such that and
 . The composition
. The composition  is
defined as
is
defined as

Let us consider a stretch () followed by a translation (). Then
we can write  and
and  .
.
The composition  is given by
is given by

The inverse composition  is given by
is given by

Isomorphism and Homeomorphism
You will also come across the terms isomorphism and homeomorphism in the literature on nonlinear solid mechanics.
Isomorphism is a very general concept that appears in several areas of mathematics. The word means, roughly, "equal shapes". It usually refers to one-to-one and onto maps that preserve relations among elements.
A homeomorphism is a continuous transformation between two geometric figures that is continuous in both directions. The map has to be one-to-one to be homeomorphic. It also has to satisfy the requirements on an equivalence relation.
Continuously differentiable functions
A function

is said to be  -times continuous differentiable or of class
-times continuous differentiable or of class
 if its derivatives of order
if its derivatives of order  (where
(where  ) exist and are
continuous functions.
) exist and are
continuous functions.
Figure 3 shows three functions ( ,
,  ,
,  )
and their derivatives.
)
and their derivatives.
 Figure 3: Continuity of functions. |
 Functions
Functions
The function is called the Heaviside step function (usually
written  ) which is defined as
) which is defined as
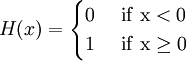
The derivative of the Heaviside function is the Dirac delta function
(written  ) which has the defining property that
) which has the defining property that

for any function  and any constant
and any constant  . The delta function is
singular and discontinuous. Hence, the Heaviside function is not
continuously differentiable. Sometimes the Heaviside function is said to
belong to the class of functions.
. The delta function is
singular and discontinuous. Hence, the Heaviside function is not
continuously differentiable. Sometimes the Heaviside function is said to
belong to the class of functions.
 Functions
Functions
The function in Figure 3 (also called a hat
function) is continuous but has discontinuous derivatives. In this
particular case, the function has the form
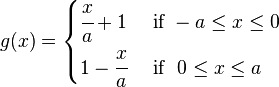
Such functions that are differentiable only once are called functions.
 Functions
Functions
The function in Figure 3 is infinitely
differentiable and has continuous derivatives every time it is differentiable.
Such functions are called functions. Since the function can
be differentiated once to give a continuous derivative, it also falls into
the category of  functions.
functions.
Sobolev spaces of functions
You will find Sobolev spaces being mentioned when you read the finite element literature. A clear understanding of these function spaces needs a knowledge of functional analysis. The book Introduction to Functional Analysis with Applications to Boundary Value Problems and Finite Elements by B. Daya Reddy is a good starting point that is just right for engineers. We will not get into the details here.
Of particular interest in finite element analysis are Sobolev spaces of functions such as

where

The function space  is the space of square integrable
functions.
is the space of square integrable
functions.
Of interest to us is an outcome of Sobolev's theorem which says that
if a function is of class  then it is actually a bounded
function. If we choose our basis functions from the set of square
integrable functions with continuous derivatives, certain singularities
are automatically precluded.
then it is actually a bounded
function. If we choose our basis functions from the set of square
integrable functions with continuous derivatives, certain singularities
are automatically precluded.