Applied linear operators and spectral methods/Lecture 4
< Applied linear operators and spectral methodsMore on spectral decompositions
In the course of the previous lecture we essentially proved the following theorem:
Theorem:
1) If a  matrix
matrix  has
has  linearly independent real or complex
eigenvectors, the can be diagonalized.
2) If
linearly independent real or complex
eigenvectors, the can be diagonalized.
2) If  is a matrix whose columns are eigenvectors then
is a matrix whose columns are eigenvectors then  is the diagonal matrix of eigenvalues.
is the diagonal matrix of eigenvalues.
The factorization  is called the spectral representation
of .
is called the spectral representation
of .
Application
We can use the spectral representation to solve a system of linear homogeneous ordinary differential equations.
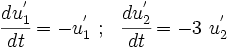
For example, we could wish to solve the system
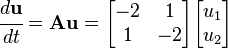
(More generally could be a matrix.)
Comment:
Higher order ordinary differential equations can be reduced to this form. For example,
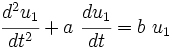
Introduce

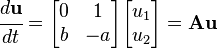
Then the system of equations is
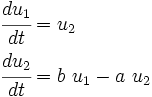
or,
Returning to the original problem, let us find the eigenvalues and eigenvectors of
. The characteristic equation is

o we can calculate the eigenvalues as

The eigenvectors are given by

or,

Possible choices of  and
and  are
are
The matrix is one whose columd are the eigenvectors of , i.e.,
and
If  the system of equations becomes
the system of equations becomes
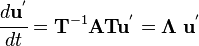
Expanded out
The solutions of these equations are

Therefore,

This is the solution of the system of ODEs that we seek.
Most "generic" matrices have linearly independent eigenvectors. Generally a matrix will
have distinct eigenvalues unless there are symmetries that lead to repeated values.
Theorem
If has  distinct eigenvalues then it has linearly independent eigenvectors.
distinct eigenvalues then it has linearly independent eigenvectors.
Proof:
We prove this by induction.
Let  be the eigenvector corresponding to the eigenvalue
be the eigenvector corresponding to the eigenvalue  . Suppose
. Suppose
 are linearly independent (note that this is true for
= 2). The question then becomes: Do there exist
are linearly independent (note that this is true for
= 2). The question then becomes: Do there exist  not all zero such that the linear combination
not all zero such that the linear combination

Let us multiply the above by  . Then, since
. Then, since
 , we have
, we have

Since  is arbitrary, the above is true only when
is arbitrary, the above is true only when

In thast case we must have

This leads to a contradiction.
Therefore  are linearly independent.
are linearly independent. 
Another important class of matrices which are diagonalizable are those which are self-adjoint.
Theorem
If  is self-adjoint the following statements are true
is self-adjoint the following statements are true
 is real for all
is real for all  .
.- All eigenvalues are real.
- Eigenvectors of distinct eigenvalues are orthogonal.
- There is an orthonormal basis formed by the eigenvectors.
- The matrix can be diagonalized (this is a consequence of the previous statement.)
Proof
1) Because the matrix is self-adjoint we have

From the property of the inner product we have

Therefore,

which implies that is real.
2) Since is real,  is real.
Also, from the eiegnevalue problem, we have
is real.
Also, from the eiegnevalue problem, we have

Therefore,  is real.
is real.
3) If  and
and  are two eigenpairs then
are two eigenpairs then

Since the matrix is self-adjoint, we have

Therefore, if  , we must have
, we must have

Hence the eigenvectors are orthogonal.
4) This part is a bit more involved. We need to define a manifold first.
Linear manifold
A linear manifold (or vector subspace)  is a subset of
is a subset of  which is
closed under scalar multiplication and vector addition.
which is
closed under scalar multiplication and vector addition.
Examples are a line through the origin of -dimensional space, a plane through the origin,
the whole space, the zero vector, etc.
Invariant manifold
An invariant manifold  for the matrix is the linear manifold for which
for the matrix is the linear manifold for which
 implies
implies  .
.
Examples are the null space and range of a matrix . For the case of a rotation
about an axis through the origin in -space, invaraiant manifolds are the origin, the
plane perpendicular to the axis, the whole space, and the axis itself.
Therefore, if  are a basis for and
are a basis for and
 are a basis for
are a basis for  (the perpendicular component of
) then in this basis has the representation
(the perpendicular component of
) then in this basis has the representation
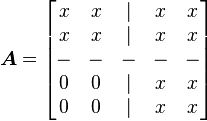
We need a matrix of this form for it to be in an invariant manifold for .
Note that if is an invariant manifold of it does not follow that
is also an invariant manifold.
Now, if is self adjoint then the entries in the off-diagonal spots must be zero too.
In that case, is block diagonal in this basis.
Getting back to part (4), we know that there exists at least one eigenpair ( )
(this is true for any matrix). We now use induction. Suppose that we have found (
)
(this is true for any matrix). We now use induction. Suppose that we have found ( )
mutually orthogonal eigenvectors
)
mutually orthogonal eigenvectors  with
with  and
and  are real,
are real,  . Note that the s are invariant manifolds of as
is the space spanned by the s and so is the manifold perpendicular to these vectors).
. Note that the s are invariant manifolds of as
is the space spanned by the s and so is the manifold perpendicular to these vectors).
We form the linear manifold

This is the orthogonal component of the  eigenvectors
eigenvectors  If
If  then
then

Therefore  which means that
which means that  is invariant.
is invariant.
Hence contains at least one eigenvector  with real eigenvalue .
We can repeat the procedure to get a diagonal matrix in the lower block of the block
diagonal representation of . We then get distinct eigenvectors and so can
be diagonalized. This implies that the eigenvectors form an orthonormal basis.
with real eigenvalue .
We can repeat the procedure to get a diagonal matrix in the lower block of the block
diagonal representation of . We then get distinct eigenvectors and so can
be diagonalized. This implies that the eigenvectors form an orthonormal basis.
5) This follows from the previous result because each eigenvector can be normalized so
that  .
.
We will explore some more of these ideas in the next lecture.
| | Resource type: this resource contains a lecture or lecture notes. |
| | Action required: please create Category:Applied linear operators and spectral methods/Lectures and add it to Category:Lectures. |