Engineering Mechanics
'Engineering mechanics is the application of mechanics to solve problems involving common engineering elements.
The goal of this Engineering Mechanics course is to expose students to problems in mechanics as applied to plausibly real-world scenarios. Problems of particular types are explored in detail in the hopes that students will gain an inductive understanding of the underlying principles at work; students should then be able to recognize problems of this sort in real-world situations and respond accordingly.
Further, this text aims to support the learning of Engineering Mechanics with theoretical material, general key techniques, and a sufficient number of solved sample problems to satisfy the first objective as outlined above.
Distinction between branches of physics
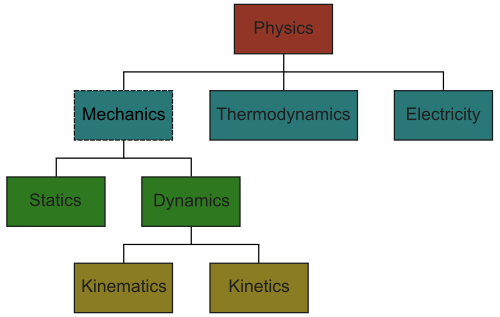
As you see in the diagram mechanics is the first and most fundamental branch of physics, supporting Thermodynamics and Electricity, and including Statics, Dynamics(=Kinematics+kinetics); all which are all highly applicable in engineering. but the most important part of them is statics (study of body at rest) which is not only a base for all others, but also have the highest engineering application. physics also involve optics, waves, quantum, and relativity theory, which have no fundamental engineering application yet.
Distinction between Physics and Engineering physics
- Difference of pure and applied science
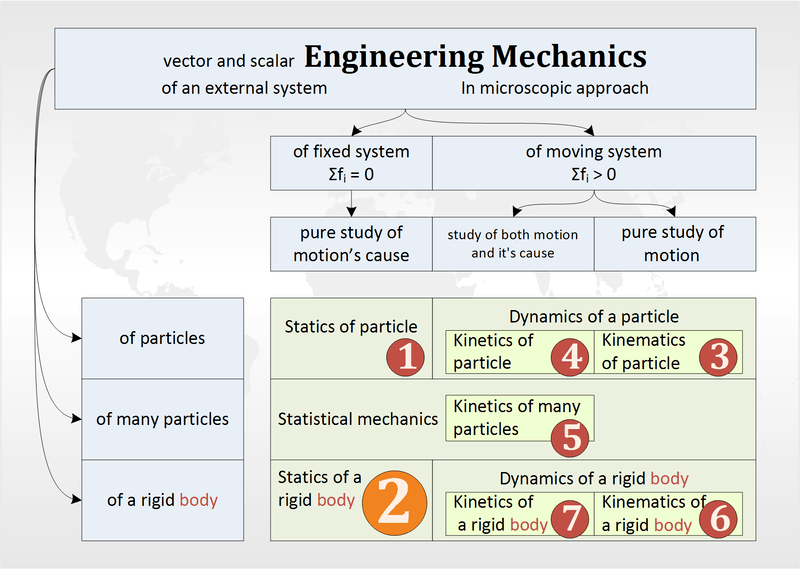
Distinction between branches of Engineering mechanics
Prerequisites
This book assumes familiarity with high school physics and calculus, although the mathematics used is fairly elementary.
Statics
We describe the motion of bodies using Newton's second law of motion

Statics deals with the situation where the acceleration () is zero - which happens when a body is at rest, or moving with constant velocity. That means that the total force on a body at rest or with constant velocity must be zero. In other words, the sum of the forces on the body must equal zero.


Engineers typically draw what is called a "free body diagram" to show all forces on a body at rest. These forces are then broken down into vectors consistent with a useful coordinate system and summed in sets (components parallel to each basis vector) which are then set to zero to meet the static constraint of no acceleration being present.
This typically results in sets of equations which can be solved using simple linear algebra techniques or even simple algebra and substitution.
Truss
forces is nothing but which act along the members, and there are no shear forces or moments. A truss is therefore defined as a system composed entirely of two-force members, which only carry axial loads.
The ends of a truss are pinned, so that they don't carry moments. The only reactions at the ends of a truss member are forces. External forces on trusses act only on the end points. Truss problems are solved by the method of sections, where an imaginary cut is made through the member(s) of interest, and global equilibrium of forces and moments are used to determine the forces in the members, or by the method of joints, in which a single joint is isolated and analyzed and the resulting forces (not necessarily with a numerical value) are transferred to adjacent joints, where the process is repeated. The resulting set of equations can then be solved by linear algebra, or substitution.
Chains and Cables
Chains and cables are attached at end points and have a continuous load on them due to their own weight (body forces) or external loads. Let a cable of length have a load of acting per unit distance between the supports. If the tension in the cable at any point is , then we have, for an infinitesimal length of the cable making an angle with the horizontal,




![{\displaystyle {\begin{aligned}{\cfrac {d}{dx}}[T~\cos \theta ]=0\\{\cfrac {d}{dx}}[T~\sin \theta ]=w\end{aligned}}}](../I/m/59902a380ebc88636e510a9224e9cea576a2c644.svg)
Thus, we have,

or
![{\displaystyle \tan \theta ={\cfrac {1}{K}}~\left[\int w~dx+C_{1}\right]}](../I/m/094ff0d406fbde48e3091a5348af7137618da633.svg)
Now

So we have a differential equation for in terms of :


![{\displaystyle {\cfrac {dy}{dx}}={\cfrac {1}{K}}~\left[\int w~dx+C_{1}\right]}](../I/m/ae29d3f31ad2cba2769e1a76f6ac86b5a4247701.svg)
Solving for ,
![{\displaystyle y={\cfrac {1}{K}}~\left[\int \left(\int w~dx\right)~dx+C_{1}~x+C_{2}\right]}](../I/m/0cc9708f9cf7f7ff50be661ddc668aa8f8342ad2.svg)
If is a constant, then we have,
![{\displaystyle y={\cfrac {1}{K}}~\left[{\cfrac {w~x^{2}}{2}}+C_{1}~x+C_{2}\right]}](../I/m/22a0453a97fb9f387db40d57faa7b4467828a1ce.svg)
which is the equation of a parabola.
For a rope where the loading is given in terms of the length of the rope (much more common), i.e., and , we have,


![{\displaystyle {\begin{aligned}{\cfrac {d}{ds}}[T~\cos \theta ]&=0\\{\cfrac {d}{ds}}[T~\sin \theta ]&=w(s)\end{aligned}}}](../I/m/5b54cc8803c236c6ce88adeb7ea41d0b44401bac.svg)
where

Dynamics
In simple words we can say, dynamics means an object is in motion with some speed when a force is applied on it. Eg: a car is moving on the road with some velocity.
While statics deal with the part of mechanics where all objects are stationary, dynamics deals with objects or structures with a non-zero acceleration.
Dynamics may be broken down into kinematics and kinetics. Kinematics deal with displacement, velocities and accelerations without concern for the forces involved. Kinetics deal with the forces and moments involved in making the body move along with the measurement of various parameters describing the motion.
Engineering Mechanics