Differential Geometry/Frenet-Serret Formulae
< Differential GeometryThe derivatives of the vectors t, p, and b can be expressed as a linear combination of these vectors. The formulae for these expressions are called the Frenet-Serret Formulae. This is natural because t, p, and b form an orthogonal basis for a three-dimensional vector space.
Of course, we know already that  and
and  so it remains to find
so it remains to find  . First, we differentiate
. First, we differentiate  to obtain
to obtain  so it takes on the form
so it takes on the form  . We take the dot product of this with t to obtain
. We take the dot product of this with t to obtain  . Taking the derivative of
. Taking the derivative of  , we get
, we get  or
or  . Also, taking the dot product of with b, we obtain
. Also, taking the dot product of with b, we obtain  . Taking the derivative of
. Taking the derivative of  , we get
, we get  . Thus, we arrive at the following expression for
. Thus, we arrive at the following expression for  :
:
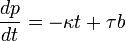 .
.
This formula, combined with the previous two formulae, are together called the Frenet-Serret Formulae and they can be represented by a skew-symmetric matrix.